Proyecto ALCOR: Contribuciones a la Optimización del Guiado Remoto de Robots en Espacios Inteligentes
Abstract
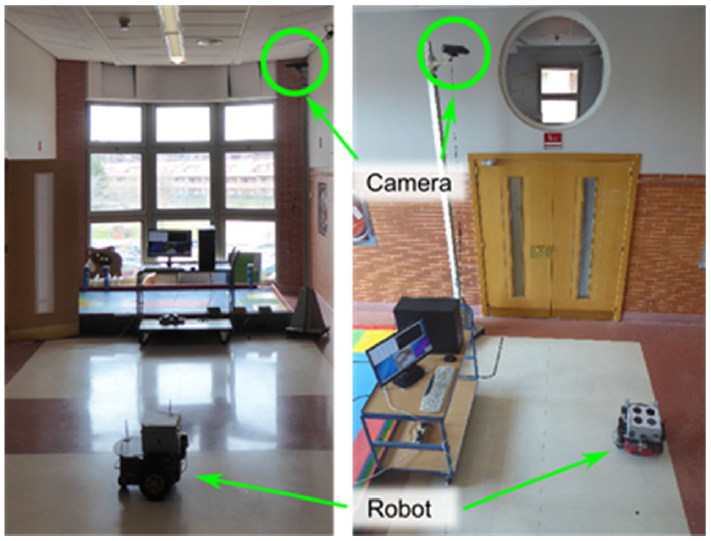
El trabajo muestra las soluciones sensoriales, de comunicaciones y control, al guiado remoto de robots en entornos inteligentes derivadas del proyecto ALCOR. En este tipo de aplicaciones la optimización de los recursos compartidos, especialmente los relacionados con la autonomía energética y con la utilización del canal inalámbrico, sigue siendo un reto. Las principales aportaciones del proyecto son: a) desarrollo de unidades sensoriales basadas en infrarrojos con precisión centimétrica en la localización de la fuente emisora y tiempos de respuesta de milisegundos; b) soluciones de comunicación inalámbrica que mejoran el enrutamiento de información y la homogeneización en el tráfico de red; y c) soluciones de control y estimación basadas en eventos con mecanismos independientes de actuación sobre la unidad móvil y de petición de medidas al módulo sensorial. Para las pruebas experimentales se ha utilizado el robot comercial P3-DX.