3D Position Estimation of an UAV in Indoor Environments using an Ultrasonic Local Positioning System
Abstract
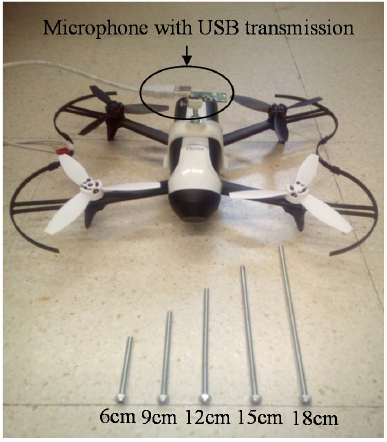
This work presents an initial study of 3D position estimation of an Unmanned Aircraft Vehicle (UAV) in indoor environments using an Ultrasonic Local Positioning System (ULPS) placed on the ceiling and composed of five emitters. The objective of this preliminary study is to determine the performance related to the estimation of the 3D position for different heights of the receiver location over the drone, since the turbulences and the acoustic noise generated by the propellers can degrade the quality of the received signal when the receiver is nearest to the drone surface. In the experiments, the UAV is stable at the initial take-off altitude to determine in a post-processing stage the dispersion related to the 3D position estimation of the drone for different heights of the receiver location. This study is presented as a base for future experiments in position and trajectory estimations of UAVs for indoor environments where there are several ULPSs installed along the localization area. At the end, the results obtained in this study allow selecting a suitable height of the receiver location that satisfies a trade-off between its position and the performance of the estimations.