Implementación de un Sistema de Posicionamiento con Luz Visible basado en focos LEDs y un receptor QADA
Abstract
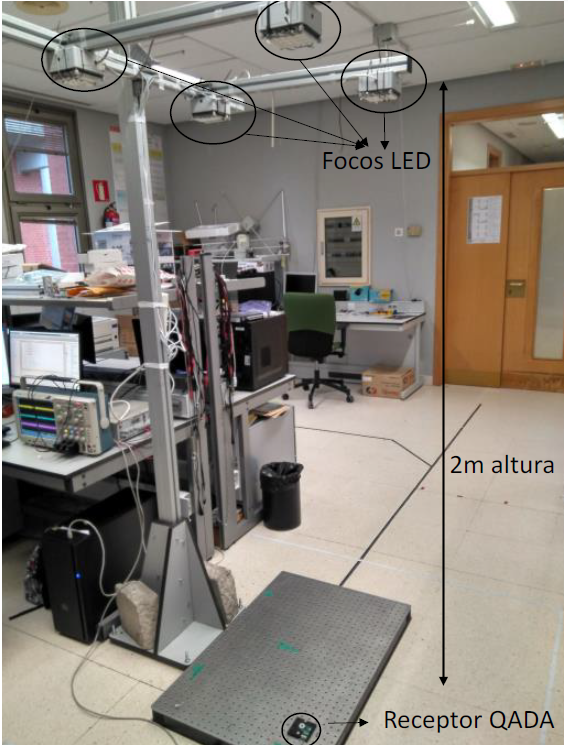
Los sistemas de posicionamiento con luz visible (VLPS) son actualmente una alternativa viable que ha comenzado a expandirse debido a su bajo coste, fácil integración en el entorno de trabajo y ausencia de riesgo para la salud. Su auge se encuentra en parte motivado por la reciente aparición de multitud de aplicaciones y servicios basados en la localización en espacios interiores. Este trabajo se centra en el diseño e implementación de un sistema local VLPS basado en un fotorreceptor QADA y cuatro focos LEDs, donde se analiza el comportamiento del array de fotodiodos empleado, así como de los transmisores en distintos puntos del volumen. El sistema propuesto utiliza medidas del ángulo de llegada para estimar la posición del receptor a partir de la codificación empleada al transmitir. El sistema ha sido validado en distintas posiciones de un volumen 2x2x2 m obteniendo errores inferiores a los 7 cm.